Relire anthropologiquement et éthiquement l’interaction entre un robot social et une personne âgée en EMS à la lumière de l’expérience corporelle vécue

Stéphanie Perruchoud est une éthicienne et philosophe suisse. Après une thèse doctorale sur la place de l’homme dans la nature centrée sur les travaux de Merleau-Ponty, elle s’est spécialisée dans le domaine de l’éthique de la vulnérabilité et plus précisément sur la notion de corps vulnérable. Elle a ainsi présenté avec succès plusieurs projets sur le vieillissement et le handicap pour lesquels elle a reçu, entre autres, la prestigieuse bourse Actions Marie-Curie. Elle travaille actuellement comme chargée de recherche au Centre interdisciplinaire de recherche en éthique (UNIL) sur un projet étudiant l’interaction entre un robot social et une personne âgée dans une institution de soins de longue durée au niveau anthropologique et éthique (IPARC financé par la Fondation Leenaards et PASOR financé par le Fonds National Suisse).
Résumé
Au travers de cet article, nous souhaitons proposer une réflexion sur ce qui se joue au niveau éthique et anthropologique dans une interaction entre une personne âgée et un robot social (Paro) en établissement médico-social (EMS). Une technologie automatique telle qu’un robot social dans un EMS occupe une place effective – c’est-à-dire d’abord physique – et propose par là-même (ou impose ?) de nouvelles formes d’interactions qui engendrent des questions éthiques – largement traitées par la littérature scientifique et populaire –, et des questions d’ordre anthropologique et philosophique. Parmi elles : quelle est la place que nous voulons donner à ces nouvelles technologies (plus largement à la technique) ? Sont-elles là pour prolonger, assister ou se substituer aux gestes du soignant ? Quel impact ont-elles sur les résidents, notamment au niveau corporel ? Y a-t-il quelque chose de bénéfique, de bon dans une interaction entre une personne âgée et un robot dans un contexte de soin tel qu’un EMS ? Dans notre travail, nous avons cherché à étudier cette interaction comme un phénomène au sens merleau-pontien – c’est-à-dire comme un fait perceptif, dénuée de charge théorique – en questionnant les stéréotypes et préjugés qui peuvent avoir une influence dans ladite utilisation avec deux objectifs principaux : mettre en lumière ce qui se passe au niveau du vécu corporel, d’une part, et proposer une évaluation éthique de ce qui peut être considéré comme « bon » dans cette interaction au regard des capacités de la personne âgée, de son bien-être et de sa qualité de vie, d’autre part.
Mots-clés : personnes âgées, robots sociaux, Paro EMS, soignants, soins, éthique, corps vécu, phénoménologie
Abstract
Through this article, we would like to discuss of what is at stake at the ethical and anthropological level in an interaction between an elderly person and a social robot [Paro] in a long-term care institution. The presence of an intelligent technology such as a social robot in a care home takes an effective – i.e. first and foremost physical – place and thereby proposes (or imposes?) new forms of interaction that give rise to ethical issues – widely addressed in the scientific literature–, and to anthropological and philosophical questions. Among them: what place do we want to give to these new technologies? Are they there to prolong, assist or replace the actions of the caregiver? What impact do they have on the residents, particularly at the body level? Is there anything beneficial or good in an interaction between an elderly person and a robot in a care context such as a care home? In our work, we sought to study this interaction as a phenomenon in the Merleau-Pontien sense – i.e. as a perceptive fact, devoid of theoretical charge – by questioning the stereotypes and prejudices that may have an influence in this kind of utilization with two main objectives: to shed light on what happens at the level of bodily experience, on the one hand, and to propose an ethical evaluation of what can be considered as “good” in this interaction regarding the capacities of the elderly person, their well-being and their quality of life, on the other hand.
Keywords: elderly, social robots, Paro, care home, caregivers, care, ethics, lived body, phenomenology
Introduction
Simone de Beauvoir soulignait, en 1970, combien la vieillesse était tabou dans nos sociétés occidentales : « La vieillesse apparaît comme une sorte de secret honteux dont il est indécent de parler » (1970, p. 7). Au cœur de sa critique se trouvait le sens que l’on attribuait à la vieillesse, d’une part, et la manière dont « les vieux » étaient traités, d’autre part ; deux postures induites, selon elle, par les représentations négatives de « la vieillesse (p. 13). Force est de constater qu’aujourd’hui, en 2022, ce sujet n’est plus aussi tabou. Le vieillissement accéléré de la population à l’échelle mondiale, la prévalence croissante des maladies chroniques, les différents besoins de prise en charge, le manque de personnel soignant sont autant de facteurs qui nous poussent à faire face de manière proactive à cette réalité anthropologique et sociologique[1]. A cet égard, l’OMS (2020) vient de consacrer une décennie entière à la promotion du vieillissement en bonne santé (healthy aging). Il y a donc un effort significatif pour penser le vieillissement de manière positive. Notre travail de recherche s’inscrit d’ailleurs dans cette démarche participative visant à améliorer la compréhension, la qualité de vie et le bien-être des personnes âgées, en particulier, dans le contexte de notre projet, des personnes âgées vivant en établissement médico-social (EMS)[2].
De fait, parler de la vieillesse ou du vieillissement en termes abstraits fait courir le risque de perdre de vue l’acteur principal, sa vie et sa perception. De nombreux chercheurs n’ont d’ailleurs pas hésité à critiquer cette notion de « vieillissement » qui n’est pas propre à une étape de la vie. Le vieillissement est un processus, un changement progressif (Kruse, 2009, p. 837). Mais le plus souvent, l’accent est mis sur les aspects les plus matériels et circonstanciels du corps : le déclin, l’acheminement vers la mort, la vulnérabilité, la dépendance (Ancet, 2010, p. 48). Dans cette perspective, il arrive que l’on assimile la personne âgée en EMS à ce déclin vital. Le problème est précisément là. Notre perception de la vie d’une personne âgée est souvent biaisée par la représentation que nous nous en faisons ; représentation réductrice de cette vie à l’apparence du corps vieillissant, organique, objectif. Un rapport récent de l’OMS traitant de l’âgisme a précisément fait état de l’impact des stéréotypes (conceptions négatives) et des préjugés (sentiments négatifs) sur la santé, le bien-être et la qualité de vie des personnes âgées (OMS, 2021). Les stéréotypes peuvent constituer un obstacle à plusieurs niveaux : au niveau de la connaissance, de la compréhension des besoins et de la prise en charge (Leung A.Y., Chan S.S. et al., 2011). A l’extrême, les stéréotypes peuvent également entraver l’accès des personnes âgées à certains types de soins (Wilson, D.M et al., 2017, p. 26).
Au travers de ce travail, nous souhaitons donc interroger et mettre en suspens l’influence des préjugés, craintes et représentations stéréotypées que nous pouvons nous faire d’une personne très âgée, souvent vulnérable physiquement et psychiquement. De cette manière, notre intention philosophique est de porter notre attention sur ce que certains phénoménologues nomment « le corps vécu », plus largement compris comme l’ensemble des expériences corporelles internes subjectives. Cette attention permet de sortir des questions purement pragmatiques de type « Aurons-nous besoin d’assistance robotique plus soutenue dans les prochaines années ? » et d’en formuler de nouvelles, en éthique notamment, telles que « Est-ce que les nouvelles technologies de type robotique sociale sont bonnes pour des personnes âgées, potentiellement vulnérables et dépendantes, qui plus est en institution médico-sociale ? » ou encore « En quel sens sont-elles bonnes ? » ; par bonnes, nous entendons bienfaisantes, qui contribue à la qualité de vie, au bien-être, à l’amélioration des capabilités personnelles (Coeckelbergh, 2010). Car c’est un fait : les nouvelles technologies occupent une place toujours plus importante en gériatrie et sont souvent présentées comme une possible solution aux divers problèmes qui caractérisent une institution gériatrique (Becker et al, 2013, p.191). Si l’efficacité d’un grand nombre de ces développements ne semble plus devoir se démontrer, en particulier au niveau logistique et organisationnel, l’utilisation de technologies dites intelligentes auprès des personnes âgées, en particulier les robots sociaux, fait débat. La littérature sur le sujet entre les défenseurs et les détracteurs de ce genre d’utilisation est fortement clivée et ne facilite pas toujours une réflexion à la fois prudente et innovante. Ce qui est en jeu au travers de toutes ces réflexions, nous semble-t-il, concerne l’amélioration de la qualité de vie et de la santé des personnes âgées en institution ; la santé comprise de façon globale comme un « état de complet bien-être physique, mental et social » (OMS, 2006). Si nous savons pertinemment que cette définition est un idéal, elle n’en reste pas moins un point de mire vers lequel toute personne est en droit – au sens de droit fondamental humain – de tendre. Pour établir une analogie avec le domaine de l’éthique, le concept de santé défini par l’OMS peut être comparable au concept de bonheur (eudaimonia) proposé par Aristote. Le bonheur aristotélicien n’est pas un état passif, mais requiert un effort actif, de bonnes circonstances et un certain recommencement dans le temps, car « une seule hirondelle ne fait pas le printemps, non plus qu’un seul beau jour ; et l’on ne peut pas dire davantage qu’un seul jour de bonheur, ni même que quelque temps de bonheur, suffise pour faire un homme heureux et fortuné » (Aristote, 2020, p. 21). La question est de savoir comment accéder à cet état de bien-être lorsque l’on est très âgé, que l’on vit en institution et que l’on dépend de personnes tierces pour les soins basiques et quotidiens ?
Dans cette perspective, de récentes études se sont penchées sur les bienfaits de l’utilisation de la robotique sociale – en particulier de la robotique sociale à forme animale (phoque, chien, chat) – auprès des personnes âgées atteintes de troubles cognitifs, notamment pour combler certains manques au niveau de l’interaction sociale (Follmann, A. et al., 2021 ; Getson, C., Nejat, G., 2021). Or l’approche par les « manques » ne nous paraît pas pleinement satisfaisante au regard d’une recherche éthique du « bien » de la personne. La vision par les manques sous-entend que la technologie vient combler un déficit, ce qui engendre de nombreuses problématiques notamment au niveau des stéréotypes et montre ainsi l’impact de leur persistance. Au contraire, une approche centrée sur les capacités (ou capabilités) des personnes bénéficiaires de ce type de soins, mais également des soignants, permet de garantir les conditions anthropologiques et éthiques du « prendre soin » dans la question de départ : en quoi l’utilisation de robots sociaux permet de « prendre soin » des personnes, âgées, en EMS, atteintes de troubles cognitifs, vulnérables, et de quelle manière ? C’est dans ce « en quoi » et « de quelle manière » que doivent se retrouver, en sus des bénéfices thérapeutiques, les conditions anthropologiques et éthiques qui permettent de donner de « bons » soins. Cela impliquera de réinterroger le concept de soin au-delà de la dimension purement médicale (distinction entre le care et le cure). Le concept de « bons soins » en vue d’une vie « bonne » et de qualité doit être, à notre sens, le principe directeur de toute utilisation (Deutscher Ethikrat, 2020).
Au niveau méthodologique, nous avons tenté de porter un regard phénoménologique sur ladite utilisation. Nous avons cherché à étudier l’interaction entre un robot social de type animal et une personne âgée comme un « phénomène », c’est-à-dire comme un fait existant dans le milieu du soin gériatrique. Et puisqu’il s’agit du soin de la personne, nous avons porté une attention particulière à ce qui se joue au niveau du vécu corporel de la personne âgée, sujet de soin. Le vécu des personnes âgées, qui plus est lorsqu’il y a atteinte des facultés cognitives et/ou langagières, nous est rarement immédiatement et distinctement accessible. Si nous ne pouvons jamais saisir de manière absolue cette réalité intérieure, subjective, nous pouvons néanmoins, comme le remarque Merleau-Ponty, nous en approcher, reconnaître un autre moi-même dont la place et les rôles pourraient, dans une certaine mesure, être interchangeables :
Et voici ce visage bien connu, ce sourire, ces modulations de la voix, dont le style m’est aussi familier que moi-même. Peut-être, dans beaucoup de moments de ma vie, autrui se réduit-il pour moi à ce spectacle qui peut être un charme. Mais que la voix s’altère, que l’insolite apparaisse dans la partition du dialogue, ou au contraire qu’une réponse réponde trop bien à ce que je pensais sans l’avoir tout à fait dit, – et soudain l’évidence éclate que là-bas aussi, minute par minute, la vie est vécue : quelque part derrière ces yeux, derrière ces gestes, ou plutôt devant eux, ou encore autour d’eux, venant de je ne sais quel double fond de l’espace, un autre monde privé transparaît, à travers le tissu du mien, et pour un moment c’est en lui que je vis, je ne suis plus que le répondant de cette interpellation qui m’est faite. (Merleau-Ponty, 1964, p. 25-26)
Notre objectif est donc de comprendre un peu plus, c’est-à-dire de cerner philosophiquement, la place du vécu corporel de la personne âgée au travers d’une interaction avec un robot social en EMS et de la traduire en des termes éthiques et anthropologiques[3]. Car, comme le souligne Sebag-Lanoë, la vieillesse est d’abord « une expérience humaine subjective » (1986, p. 41). Cela signifie, par ailleurs, que nous laissons volontairement de côté d’autres types de questionnement que pourrait susciter cette interaction, à savoir les questions d’ordre métaphysique-ontologique et futuriste de type « est-ce que des relations de type posthumaines sont possibles » (Petersen, 2017) ou encore « est-ce qu’un robot pourra un jour ressentir, être compatissant » ? Suivant la méthode phénoménologique (Perruchoud, 2017), nous avons volontairement mis en suspens les stéréotypes, idées données et préjugés sur les personnes âgées et les robots pour interroger les faits : la présence des personnes âgées et des robots en EMS, leur interactions et l’impact pour ou malgré le corps âgé vivant. Pour ce faire, nous avons étudié la littérature empirique spécialisée (études) et philosophiques de ces dernières années, afin de a) chercher à avoir une perception claire des acteurs du contexte que nous étudions , b) interroger ce qui se joue dans l’interaction entre un robot social et une personne âgée, en EMS en mettant entre parenthèse les préjugés et stéréotypes c) mettre en lumière les aspects philosophiques et anthropologiques liés au corps vivant âgé résultant de cette interaction, d) donner des clefs d’évaluation éthique et anthropologique pour une « bonne » utilisation de la robotique sociale.
I. Personne âgée et robots sociaux en EMS : entre préjugés, stéréotypes et réalité
I.1. Du côté de la personne âgée
Il est sans doute difficile d’avoir un débat rationnel et posé lorsque celui-ci est empreint de charge émotionnelle, de craintes, de préjugés et de stéréotypes. Malgré la légitimité du poids émotionnel et affectif concernant le débat autour de l’utilisation de robots sociaux auprès de personnes vulnérables, nous allons tenter ici de discuter l’influence des craintes, stéréotypes et préjugés dans ce qui pourrait être potentiellement un moyen de prise en soin bienfaisant.
Si la question de l’utilisation de robots sociaux auprès des personnes âgées soulève des questions éthiques et anthropologiques sérieuses, elle réinterroge, plus profondément, l’image que nous nous faisons d’une personne très âgée (oldest old), vulnérable et dépendante, et qui vit en établissement médico-social. Kruse (2008) et Schmitt (2008), tous deux spécialistes en gérontologie, ont montré l’influence des rôles sociaux dans la perception que nous avons des différentes personnes qui composent la société. De la sorte, dans l’opinion commune, l’âge représente bel et bien une catégorie sociale (Backes, 2004). Dans cette logique, « être âgé », voire « très âgé », signifie par ailleurs ne plus être actif professionnellement et, conséquemment, être une possible charge (financière, morale, etc.) pour la société. Selon cette vision, les personnes âgées sont considérées « hors du champ de la capacité » (Foucault, 2003, p. 244). Par capacité, nous comprenons l’ensemble des aptitudes en lien avec la vie professionnelle, sociologique, mais également intellectuelle, culturelle ou encore physique. De nombreux préjugés entourent les capacités des personnes très âgées comme si leurs capacités avaient fait leur temps.
Un des problèmes éthiques majeurs est que ces perceptions, focalisées sur les déficits, peuvent constituer une série d’obstacles à la réalisation personnelle, à la santé, à la qualité de vie, au bien-être et au bonheur de tout un chacun. Cela est particulièrement vrai dans le contexte des EMS qui sont parfois perçus comme des mouroirs, plutôt que comme des lieux de vie dans lesquels une vie pleine et stimulante est encore possible (Laroque, 2004, p. 20-21). Il y a également une idée largement répandue selon laquelle plus une personne est âgée, plus elle est susceptible d’être fragile, dépendante et vulnérable (Cuddy, A.J.C., Fiske., S.T., 2002). Simone de Beauvoir, en 1970, avait des mots relativement durs pour qualifier l’image que la société occidentale pouvait se faire des personnes âgées : « Le vieillard ne fera que descendre vers la décrépitude et la mort : il ne sert à rien. Pur objet encombrant, inutile, tout ce qu’on a souhaité c’est pouvoir le traiter en quantité négligeable » (1970, p. 347). Un peu plus récemment, en 1992, la philosophe et médecin gériatre Sebag-Lanoë offrait une analyse guère plus encourageante : « Il est vrai que notre société n’aime pas vraiment la vieillesse ! Tout est fait contre le vieillissement et non pour ou avec… Pourtant, nous vieillissons de plus en plus » (p. 12).
 Un rapport récent de l’OMS a souligné l’impact des attitudes âgistes[4] sur la santé (mentale et physique), ainsi que sur la qualité de vie et le bien-être des personnes âgées (OMS, 2021). Cet impact peut se compter en milliard de dollars de coûts pour la société (p. XVI). Il existe différentes formes d’âgisme conscientes et non-conscientes qui se déclinent tout à la fois en stéréotypes (comment nous pensons), préjugés (comment nous nous sentons) et attitudes discriminatoires (comment nous nous comportons) agissant comme des barrières à l’épanouissement et la réalisation personnelle du public impacté (p. XV). Selon une étude récente mentionnée dans le rapport, une personne sur deux aurait des attitudes âgistes dans le monde (Officer, A. et al., 2020). Un des facteurs influant dans la construction sociale des schémas négatifs autour de la vieillesse est sans doute la peur : la peur de la vieillesse, de la mort, des maladies, de la perte de dignité, ou encore d’être traité de manière inhumaine (OMS, 2021, p. 69). La vieillesse, la mort ou encore la maladie ont été qualifiées par Karl Jaspers de « situations-limites » en ce sens qu’elles ne peuvent être ni dépassées, ni affranchies (Jaspers, 1965). Face à ces situations, la peur, le déni ou la révolte sont des réactions communes. La vieillesse étant souvent perçue depuis l’angle de la perte, la peur et le déni sont souvent de mise : « Notre société réserve à la jeunesse le bénéfice et à la vieillesse le déficit » (Sebag-Lanoë, 1992, p. 23). L’accent est alors principalement mis sur le vieillissement physique ou organique au risque de ne voir que cela ou de généraliser (OMS, 2021, p. 3).
Un rapport récent de l’OMS a souligné l’impact des attitudes âgistes[4] sur la santé (mentale et physique), ainsi que sur la qualité de vie et le bien-être des personnes âgées (OMS, 2021). Cet impact peut se compter en milliard de dollars de coûts pour la société (p. XVI). Il existe différentes formes d’âgisme conscientes et non-conscientes qui se déclinent tout à la fois en stéréotypes (comment nous pensons), préjugés (comment nous nous sentons) et attitudes discriminatoires (comment nous nous comportons) agissant comme des barrières à l’épanouissement et la réalisation personnelle du public impacté (p. XV). Selon une étude récente mentionnée dans le rapport, une personne sur deux aurait des attitudes âgistes dans le monde (Officer, A. et al., 2020). Un des facteurs influant dans la construction sociale des schémas négatifs autour de la vieillesse est sans doute la peur : la peur de la vieillesse, de la mort, des maladies, de la perte de dignité, ou encore d’être traité de manière inhumaine (OMS, 2021, p. 69). La vieillesse, la mort ou encore la maladie ont été qualifiées par Karl Jaspers de « situations-limites » en ce sens qu’elles ne peuvent être ni dépassées, ni affranchies (Jaspers, 1965). Face à ces situations, la peur, le déni ou la révolte sont des réactions communes. La vieillesse étant souvent perçue depuis l’angle de la perte, la peur et le déni sont souvent de mise : « Notre société réserve à la jeunesse le bénéfice et à la vieillesse le déficit » (Sebag-Lanoë, 1992, p. 23). L’accent est alors principalement mis sur le vieillissement physique ou organique au risque de ne voir que cela ou de généraliser (OMS, 2021, p. 3).
Le rapport sur l’âgisme a voulu montrer que ces généralisations (overgeneralizations), encore trop présentes dans notre société, peuvent être particulièrement néfastes, notamment au niveau de l’accès aux soins, dans des moments de crises tels qu’une pandémie (p. 24-26). Les stéréotypes peuvent, d’une part, influencer nos perceptions des soins (Deutscher Ethikrat, 2020, p. 41) et, d’autre part, rendre difficile l’accès à certains types de soins (OMS, p. 25). Le rapport sur l’âgisme, en plus de nous aider à prendre conscience de l’impact négatif de certaines de nos pensées, sentiments et actions vis-à-vis du vieillissement, insiste sur les ressources et capacités existantes à n’importe quelle étape de la vie, y compris dans les étapes dites de « maturité ».
I.2. Du côté des robots sociaux
Concernant l’utilisation de robots dits sociaux auprès des personnes âgées, particulièrement en institution de soins de longue durée, il est vrai que l’idée est loin de faire l’unanimité. Une utilisation de la robotique au niveau industriel paraît plus compréhensible. En effet, il y a des tâches, dans le domaine du travail, requérant force et répétition qui justifient l’utilisation de la robotique. Dans le domaine du soin, en particulier du soin gériatrique, il peut y avoir des interrogations plus ou moins légitimes. De fait, de nombreuses critiques entourent une telle utilisation, notamment à cause de la crainte que les robots finissent par se substituer aux gestes humains si importants dans le cas de personnes nécessitant des soins particuliers et rapprochés (Rabbitt et al., 2015). Un des problèmes soulevés est que l’on remplace définitivement la main chaude par la présence de robots froids et sans empathie (Juel et al, 2018). A ce propos, Beauchamps et Childress nous rappelle le droit des patients à avoir des contacts physiques directs (Beauchamp, Childress, 2008). Ce droit implique, réciproquement, le droit des soignants à avoir un contact direct avec leurs patients[5].
Il est vrai que l’analyse de l’état de l’art sur la question repose sur des conceptions du robot social peu nuancées (Jøranson, 2016, p. 62), avec deux camps passablement opposés : les défenseurs de de la robotique (principalement des ingénieurs), d’un côté, ses détracteurs (principalement des philosophes/éthiciens) de l’autre. Le fait est que certains robots, en particulier animaloïdes, sont conçus de manière à reproduire très fidèlement la forme et une partie des comportements de leur modèle avec le risque, dans le cas de personnes atteints de troubles psychiques profonds, de confondre l’art et la réalité (Calo et al. 2011). Cette confusion est du reste largement entretenue par certains médias, concepteurs et chercheurs qui n’hésitent pas à parler de ces robots en termes de « compagnons », « sensibles », « capables de sentiments et d’empathie » (Libin, 2005). Ce sont dès lors ici les principes éthiques touchant à l’autonomie, la dignité, l’intégrité, le respect de la vulnérabilité des résidents et des soignants qui pourraient être gravement atteints (Kemp, 2000). Le robot social peut être perçu comme une menace pour l’intégrité et la dignité de la personne humaine (Meyer et al, 2020). Ce risque n’est effectivement pas négligeable lorsque l’on envisage d’utiliser des technologies auprès de personnes particulièrement vulnérables, notamment des résidents atteints de troubles cognitifs tels que la maladie d’Alzheimer (Becker et al, 2013, p. XI). Une des clefs que donne l’étude de Ta-Swiss pour que le design (la forme) du robot social contribue au bien-être de la personne âgée pouvant souffrir de troubles cognitifs, est que la forme, par exemple humanoïde, soit en adéquation avec la compétence fonctionnelle (Becker et al, 2013, p. 48). Cela demande une réflexion de la part du concepteur à propos de la finalité dans le design.
En outre, l’origine sémantique du terme « robot » renvoie à cette idée même de substitution technique et pratique du travail de l’homme. Le mot « robot » d’origine tchèque (robota) fait référence à une sorte de travailleur forcé – machine à apparence humaine – qui est voué à remplacer le travail humain (Becker, et al, 2013). Dès lors, si le concept de « substitution » peut être plus facilement compris dans un contexte tel que celui de l’industrie qui requiert des tâches répétitives et pénibles du point de vue physique, il amène toutefois quelques inquiétudes lorsqu’il s’agit d’un domaine impliquant des personnes humainement – c’est-à-dire corporellement, émotionnellement et psychiquement – vulnérables (Becker et al, 2013, p. 62). C’est pourquoi les différentes études, articles et communiqués traitant de la question de l’utilisation de ce type de technologie dans le domaine du soin en gériatrie insistent sur le fait qu’il ne peut jamais être question de « substitution » de l’être humain, mais plutôt de soutien et d’assistance (Borenstein et Pearson, 2010 ; Misselhorn et al., 2013 ; Sharkey et Sharkey, 2010).
I.3. L’interaction personne âgée-robot social comme phénomène
Les technologies d’assistance – Ambient Assisted Living (AAL) – regroupent les différents dispositifs de nouvelle génération, possédant a priori les caractéristiques suffisantes d’intelligence et d’autonomie pour venir en aide et assister les labeurs des soignants. Un des objectifs du programme AAL est d’améliorer la qualité de vie et le bien-être des personnes âgées (Rüegger, Roulet Schwab, & Eggert, 2016, p. 6). Dans ce contexte, les robots sont des ALL (AAL robotics) intéressants.
L’étude de Becker (2013) définit trois types de robots-AAL divergeant selon leur finalité :
- Les robots de réhabilitation qui aident à l’entraînement et aux mouvements afin de favoriser la mobilité et l’autonomie.
- Les robots d’assistance ou de soins qui facilitent la vie des soignants et/ou des patients.
- Les robots sociaux ou relationnels qui ont pour but d’interagir et d’accompagner les personnes âgées.
Les robots « sociaux » sont donc des technologies dotées d’une intelligence artificielle et créées spécifiquement pour communiquer et entrer en relation avec autrui (Kolling et al., 2013). De nombreuses études ont nuancé cette capacité à « communiquer » et « entrer en relation » (Devillers, 2020). Le terme social ou interaction évoque d’ailleurs des conduites et attitudes « humaines ». D’après Jøranson, on ne peut pas parler d’interaction au sens strict, car il n’y a pas de réciprocité réelle ; d’où le danger de leurre avec les personnes atteintes de démence sénile (2016). La réciprocité, l’empathie, la capacité de sentir chez les robots alimentent les débats autour de la nature des robots. D’un point de vue phénoménologique, c’est-à-dire des faits existants aujourd’hui, il n’existe aucun indice qui nous permette d’affirmer que les robots possèdent ces capacités, ni qu’ils les posséderont dans le futur (Devillers, 2021). A cet effet, Meister (2011) suggère de ne pas utiliser le terme « interaction » qui évoque des comparaisons avec les humains, mais plutôt « interactivité » dans le sens de processus d’activité entre des entités fondamentalement différentes.
De cette manière, les robots sociaux interactifs sont aujourd’hui utilisés pour animer certaines activités dans les EMS (gymnastique, musique, interactions sociales), pour stimuler les personnes âgées et pour réduire leur sentiment de solitude (Carrion Martinaud, Bobillier-Chaumond, 2017). Ils ne fourniraient donc pas seulement des services de l’ordre pratique, mais comme le suggère Broekens, ils ont été créés pour être de véritables compagnons (Broekens, Heerink, & Rosendal, 2009, p. 95). Il existe différents types de robots sociaux possédant des fonctions plus pragmatiques (annoncer un menu), ou alors des fonctions plus interactives (échange de communications), mais les plus connus et, peut-être également les plus étudiés, sont les robots à forme animale (Bemelmans et al., 2012). Prenant la forme de phoques, de chats ou de chiens, ils réagissent au toucher et aux sons par des mouvements et des sons spécifiques. Certains d’entre eux, comme Paro, disposent d’éléments de reconnaissance vocale et répondent, par là-même, à leur nom et aux voix avec lesquelles ils interagissent habituellement (Jøranson, 2016). Si certaines critiques évoquent le risque de confusion chez la personne âgée atteinte de troubles cognitifs entre l’artifice et la réalité (Sparrow & Sparrow, 2006) – confondre un chat robot avec un vrai chat – les résultats de différentes études académiques sur l’utilisation de robots sociaux auprès des personnes âgées sont plutôt positives.
En ce sens, les robots sociaux à forme animale – en particulier Paro[6] pour lequel de nombreuses études sont à ce jour disponibles – semblent être d’excellents outils thérapeutiques innovants auprès des personnes atteintes de troubles cognitifs, de telle sorte qu’ils sont considérés comme une alternative thérapeutique valable aux soins médicamenteux. Un tel « outil » peut ainsi être considéré comme une valeur ajoutée pour les soins quotidiens (Bemelmans et al., 2016). Paro est un robot d’assistance thérapeutique fabriqué au Japon par le Dr. Shibata en 2005 et utilisé principalement auprès de personnes souffrant de troubles cognitifs (Meunier, Bizzozzero, 2021, p. 1225). Il a été conçu pour toucher les gens émotionnellement pendant les interactions (Kolling et al, 2013). Il donne l’illusion qu’il réagit à son environnement pendant les interactions en parlant ou en le caressant (Shibata, Wada, 2011). Paro est le premier robot social d’assistance certifié DM de classe 1 pour agissement sur divers troubles comme l’anxiété, la dépression, l’agitation, l’agressivité, maladie d’Alzheimer. Une étude récente suisse (Meunier, Bizzozzero Foletti, 2021) a montré les bénéfices de l’utilisation de Paro auprès des personnes âgées atteintes de démence. L’étude a montré que, jusqu’à un certain niveau de démence[7], le contact avec le phoque Paro diminue les comportements d’agitation pathologique, les troubles du sommeil, l’anxiété, les douleurs et, par conséquent, la prise de médicaments psychotropes ou antalgiques (p. 1227). Par son aspect rassurant, doux, aimable, cette thérapie non-médicamenteuse se base sur une « utilisation sensorielle du toucher-tendresse… permettant ainsi de baisser l’anxiété » (p. 1228).
D’autres bénéfices ont été rapportés dans la littérature scientifique sur cette utilisation. Parmi eux, les suivants (nous avons spécifié à chaque fois quelles compétences ces bénéfices mettaient en jeu) :
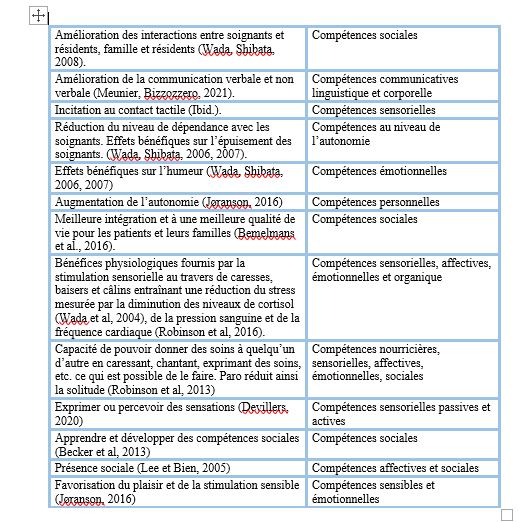
Ainsi, l’utilisation de certains robots sociaux tels que Paro semble favoriser des compétences humaines, parmi lesquelles des compétences émotionnelles (avoir des émotions positives de joie, de plaisir), relationnelles (entrer en relation avec des choses, des personnes), sociales (favoriser les contacts sociaux entre résidents ou avec les soignants) et sensorielles (toucher, voir, écouter, ressentir). Mais surtout, en nous plaçant du côté de l’expérience vécue – dont celles des personnes particulièrement atteintes au niveau cognitif – ces différentes études nous montrent que la vie d’une personne âgée en institution, loin de s’éloigner d’une vie humaine active, est capable de ces mouvements vitaux qui nous permettent de ressentir, d’être stimulés, d’entrer en relation avec et, plus largement, de communiquer avec le monde et avec autrui : « Bien que les personnes atteintes de démence se trouvent souvent psychologiquement ailleurs dans le temps et l’espace, elles ont encore des capacités et des fonctions restantes qui peuvent être stimulées.» (Jøranson, 2016, p. 19).
L’utilisation de robots sociaux, particulièrement à forme animale, dans un contexte de vie tel qu’un EMS, nous révèle donc l’importance du vécu corporel personnel bien vivant et bien présent malgré la possibilité de troubles existants au niveau cognitif. À nouveau, l’étude de Meunier et Bizzozzero, non seulement au travers de l’étude des bénéfices de la robotique sociale, mais également au travers des bienfaits de la musicothérapie (music care), nous montre qu’une stimulation contrôlée et équilibrée au niveau sensoriel peut contribuer au bien-être et à la qualité de vie des personnes âgées atteintes de troubles cognitifs (2021). Dans cette perspective, la finalité d’une telle utilisation est celle de permettre à la personne âgée, sujet de soin, d’accéder au meilleur état de bien-être et de qualité de vie possible, c’est-à-dire un état de santé globale optimale, au travers de la reconnexion avec une vie sensible, sociale, interactive, corporelle et humaine (Deutscher Ethiksrat, 2020). Le robot social est donc caractérisé comme un moyen, un vecteur thérapeutique au service du soignant et du résident.
II. Regards sur le corps vécu
Nous voulons mettre en lumière ici ce qui se joue au niveau de l’expérience corporelle vécue. Car les différentes études présentées dans cet article montrent, entre autres, la réactivité sensori-motrice dont font preuve les personnes âgées, en particulier celles atteintes de troubles cognitifs, au travers d’une mise en situation interactive avec un robot social, dans un contexte de vie tel qu’un EMS. Wright (2018), au travers d’une étude qualitative réalisée dans une résidence publique pour personnes âgées du Japon, montre que l’on ne doit pas négliger l’expérience tactile qui se joue entre un soignant et une personne âgée au travers d’actions apparemment banales et pénibles comme le portage. L’utilisation d’un robot pour « soulager » le soignant révèle en fait un manque : celui de l’interaction sensible et émotionnelle qui se joue dans le corps à corps. C’est pourquoi, au-delà de la compétence ou du caractère innovant de ces produits technologiques, il nous semble qu’un des défis éthiques majeurs est d’analyser ces résultats afin de repenser et de comprendre, de manière plus fine, la richesse de la vie d’une personne âgée, plus ou moins dépendante, plus ou moins vulnérable, résidant en institution. Loin de la passivité et de l’inactivité que peuvent inspirer les stéréotypes et préjugés à propos d’une vie telle, ces résultats montrent au contraire l’existence et la légitimité d’une vie humaine subjective et active qui trouve des bénéfices dans une stimulation sensorielle mesurée et équilibrée Pour reprendre des termes plus spécialisés, il y a un « engagement » sensible, tactile, social, humain du côté de ces résidents qui rend compte d’une impulsion de vie (Bergeret, 2016), autrement dit, de l’existence effective d’un monde vécu intérieur ; ce monde vécu intérieur, que Merleau-Ponty, de même que d’autres phénoménologues, ont situé sous le concept de « corps vécu ». Pour Pierre Ancet, spécialiste de la pensée de Merleau-Ponty, le corps vécu désigne tout à la fois le corps et le psychisme. C’est ce point de contact intérieur entre « moi » – pensée, sensibilité, corps vécu– et le monde (Ancet, 2010, p. 10).
Merleau-Ponty distingue le corps vécu, c’est-à-dire le corps tel qu’il est ressenti, expérimenté, habité, du corps objectif, organique, apparent – le corps vieillissant, par exemple – non pour signifier deux réalités opposées ou contradictoires, mais pour souligner l’importance de sa dimension intérieure, invisible, subjective, pôle de sensations kinesthésiques et de connaissances pratiques (Merleau-Ponty, 1945, p. 164). De cette manière, pour ce philosophe, il n’y a pas de doute que ce qui sous-tend et soutient la vie cognitive est la vie corporelle sensible. Le corps subjectif, ou encore corps propre, se présente dès lors comme un système dynamique, une « posture en vue d’une certaine tâche actuelle ou possible » (Merleau-Ponty, 1945, p. 116). Depuis cette perspective, le corps est le moyen par excellence d’être au monde, le point 0 à partir duquel se décline une myriade de possibilités[8]. Depuis l’expérience vécue – point de contact entre le moi subjectif, sentant, vivant et le monde sensible – le corps se dessine comme une source de possibilités, un « je peux ». Pour Merleau-Ponty, l’être humain, parce que corporel dès son origine, est primordialement un « je peux », sentir, vivre, échanger, etc., avant un « je veux » ou « je pense » (1995, p. 365).
D’autres théories, plus récentes, ont également mis en évidence l’importance du sentir dans l’existence humaine et, d’une manière peut-être plus particulière, dans l’existence d’une personne âgée touchée dans ses facultés cognitives. C’est le cas du « passeport sensoriel » de Jean-Philippe Assal (2020) qui décrit l’importance de la mémoire sensorielle : « En effet, alors que la mémoire cognitive peut être déficiente, la mémoire sensorielle de ce qui émeut et procure du plaisir semble perdurer et mieux résister aux atteintes organiques » (p. 22). Le sentir, comme connaissance originaire au travers des cinq sens, est ce qui permet à l’être humain d’avoir et d’être au monde : « Sentir n’est pas connaître ; c’est un éprouvé de chacun dans sa réception du monde, à la fois dans le monde et avec le monde, bien plus que devant un monde qu’on objectiverait … Le sentir retient la personne gravement, dans une sorte de suspension attentive du corps et de la respiration… Les sens constituent la voie royale de l’être humain pour devenir encore plus humain » (p. 14). Selon l’étude de Ta-Swiss dirigée par Becker, l’incarnation, c’est-à-dire la capacité d’apprendre et de connaître de manière sensorimotrice – est devenu un véritable défi (Becker et al, 2013, p. 46). L’interaction d’une personne âgée en EMS avec un robot social à forme animale de type Paro révèle donc, il nous semble, l’importance du corps vécu, sensible et sentant qui continue de se tenir « debout »[9], malgré les difficultés physiques ou psychiques, au milieu du monde et des choses avec lesquels il communique, interagit, réfléchit (dans le sens de réminiscence sensorielle). Au travers de la stimulation des sens, en particulier du toucher, l’interaction avec Paro permet de mobiliser le corps vécu de plusieurs manières possibles : sens propres, sens communs (imagination, mémoire), schéma corporel. La stimulation de ce corps vécu, au travers de différents moyens thérapeutiques (robots sociaux, musique, activités sensorielles), permet à la personne âgée de continuer de communiquer avec une vie sensible intérieure, avec le monde et les personnes qui l’entoure améliorant ainsi sa qualité de vie, son bien-être, sa santé globale.
Dans une perspective phénoménologique, l’interactivité avec un robot social à forme animale emet en lumière la place du corps vécu chez une personne âgée, plus ou moins atteinte dans ses facultés cognitives, et l’importance d’une stimulation sensorielle mesurée (Becker et al, 2013, p. 54). Le corps, disait Merleau-Ponty « est le lieu d’une certaine praxis, le point à partir duquel il y a quelque chose à faire dans le monde, le registre où nous nous sommes inscrits, et continuons de nous inscrire, et par là elles [les recherches contemporaines sur le schéma corporel] renouvellent notre idée de l’espace et du mouvement » (1986, p. 16). De cette manière, le contact avec un objet sensoriel, interactif et ludique tel que Paro peut induire des éveils et des réminiscences sensorielles positives améliorant ainsi la qualité de vie, le bien-être et la santé de la personne âgée en situation. Car, comme le dit parfaitement Hassal, « la relation essentielle passe avant tout par les sens. C’est par les sens que l’on peut communiquer le mieux, au plus près de chacun » (2020, p. 5). De nombreuses expériences et projets de recherche attestent aujourd’hui du rôle de la mémoire sensorielle et de la place du corps vécu chez la personne humaine. Rappelons l’histoire de cette ancienne danseuse étoile, Marta C. Gonzalez, atteinte d’Alzheimer, qui se souvient de la gestuelle d’une danse pratiquée cinquante ans plus tôt en interaction avec un soignant et la musique du « Lac des Cygnes » (Perez, 2020). Sebag-Lanoë, anciennement Directrice d’un centre hospitalier gériatrique dit hospice[10], s’est appliquée à défendre la dimension vivante des personnes âgées et, en particulier, des personnes âgées considérées en fin de vie. La fin de vie, dans sa perspective, est toujours de la vie. Et être vivant, c’est être capable de besoins, de sensations et de désirs. D’où son appel aux soignants, mais également aux proches-aidants, à retrouver le contact et la conscience de la dimension vécue corporelle des personnes soignées (1984, p. 94).
Toutefois, si l’utilisation d’un robot tel que Paro peut venir (re-)mettre en lumière l’importance de cette « vie humaine subjective et active », elle n’en réduit pas pour autant les questions fondamentales éthiques et anthropologiques qui demeurent au travers de cette utilisation : était-il besoin d’attendre l’existence d’un robot comme Paro pour pouvoir mettre au jour l’importance du vécu d’une personne âgée atteinte de démence et en institution ? Le robot est-il un simple révélateur ou un co-créateur de cette dimension ? De quelles autre manières cette vie subjective peut exister sans un médiateur de type robotique, au travers de la simple relation soignant-soigné ?
III. Vers de bons soins
Dans le cadre des soins gériatriques prodigués dans une institution médico-sociale, le type d’interaction qui semble le plus respectueux ou le plus approprié a été défini par la philosophie du soin comme celui qui met en relation la personne âgée avec le soignant : « Le soin est, en effet, généralement envisagé comme une relation intersubjective et éthique où un sujet prête attention à la subjectivité d’autrui dans toute sa fragilité et son originalité » (Doron et al., 2011, p. 4). C’est dans ce « corps à corps » originel et original que toute pratique et éthique du soin se développe habituellement (Juliens, 2016, p. 15) ; l’être humain constituant le centre de la pratique du soin (Becker et al, 2013, p. 123). C’est donc avec et au travers de ce socle humain que peut et doit être pensé la place et l’utilisation d’un robot dit social. Dans ce cadre, l’interaction ne se vit pas dans un dialogue exclusif entre une personne âgée et un robot, mais plutôt dans une relation triangulaire de soin « soignant, soigné, robot » dans lequel le robot fait office d’outil thérapeutique, voire ludique (Parviainen & Pirhonen, 2017). Il s’agit pour le soignant d’une autre manière de rejoindre le patient, d’entrer en contact avec lui, de le toucher différemment afin d’éveiller en lui ou de calmer des dimensions humaines (sensibilité, mémoire, imagination) qui lui permettront de surmonter des difficultés (stress, douleurs, sentiment de solitude) et, par là-même, d’améliorer son état de bien-être général. En ce sens, le robot comme outil thérapeutique peut être considéré comme une forme de soin qui agit comme un prolongement ou un complément des capacités du soignant (Becker et al., 2013, p. 53).
Du côté du bénéficiaire, le robot peut également être considéré comme un activateur ou un catalyseur de capacités sensibles, communicatives, affectives. L’utilisation de la robotique acquiert du sens – thérapeutique, éthique, anthropologique – si elle est intégrée dans une vision globale de soins infirmiers visant à améliorer ou à maintenir les capacités avec, pour but final, l’amélioration de la qualité de vie et le bien-être des bénéficiaires. Il nous semble que, du point de vue éthique, l’utilisation de la robotique pour combler des manques (ou déficits) – manque de présence, manque de stimulation, manque d’interactions – est problématique (Becker et al, 2013, p. 53) et risque d’accentuer les stéréotypes et préjugés. Ainsi, il s’agit plutôt de se demander si l’utilisation de la robotique sociale auprès d’un certain public favorise ou maintient les capacités personnelles – physiques, psychiques, émotionnelles – et contribue, en tant que moyen thérapeutique ou auxiliaire, au bien-être général de la personne (Deutscher Ethiksrat, 2020).
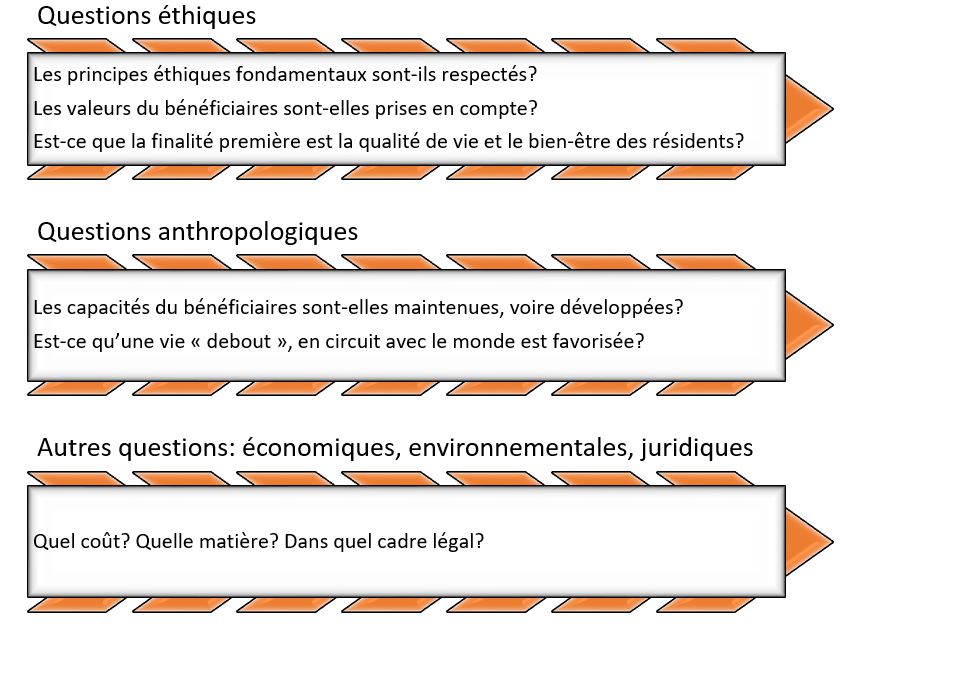
L’évaluation éthique porte donc, à notre sens, autant sur la finalité ultime de l’utilisation de la robotique sociale – est-ce que l’utilisation de tel moyen contribue à la santé et au bonheur de la personne âgée ? – que sur les moyens – comment tel moyen peut-il garantir une utilisation qui respecte les principes fondamentaux de l’éthique médicale (autonomie, bienfaisance, intégrité, etc.), d’un côté, et qui renforce les capacités personnelles, de l’autre ? En amont de l’évaluation thérapeutique, voici un tableau récapitulatif des questions anthropologiques, éthiques et autres (économiques, environnementales, juridiques)[11] qui peut orienter l’utilisation de la robotique sociale auprès des personnes âgées potentiellement vulnérables et résidant en EMS.
Conclusion
Au travers de cet article, nous avons cherché à montrer l’impact des stéréotypes, craintes et préjugés présents plus ou moins implicitement dans le cadre d’une utilisation de robots sociaux, de type Paro, auprès de personnes âgées, vulnérables, résidant en EMS.
Nous avons montré qu’une lecture pondérée de cette interaction comme « phénomène » implique d’une part de mettre entre parenthèse les idées préconçues sur le sujet et d’observer ce que cette interaction a comme effet au niveau de l’expérience vécue.
Depuis la perspective de la phénoménologie du corps, nous avons mis en évidence l’importance de l’expérience corporelle vécue chez la personne âgée pouvant souffrir de troubles cognitifs et résidant en EMS. Nous avons également souligné la pertinence d’une stimulation sensible mesurée et intégrée dans un projet thérapeutique plus ample multisensoriel et non-médicamenteux.
Enfin, nous avons proposé une lecture anthropologique et éthique de cette interaction afin de donner des clefs pratiques en vue d’une utilisation humainement acceptable et recommandable.
Bibliographie
Ancet, P. (2010), Le corps vécu chez la personne âgée et la personne handicapée. Paris : Dunod. Édition du Kindle.
Assal, J.-P., Assal, T., & Horn, O. (2020), Mode d’emploi pour voyager dans les sens. Qu’est-ce que le passeport sensoriel ? Chêne-Bourg : Médecine et Hygiène.
Beauchamp, T. L., Childress, J. F. (2008). Principles of Biomedical Ethics (6 ed.). New York: Oxford University Press.
Backes, G. (2004). Alter und Altern im Kontext der Entwicklung von Gesellschaft. In: Kruse, A./Martin, M. (dir.).Enzyklopädie der Gerontologie: Alternsprozesse in multidisziplinärer Sicht Hardcover. Bern: Hogrefe AG, 82-96.
Bergeret-Amselek, C. (2016). Qui sont ces nouveaux analysants de plus de 70 ans ? Quel est leur désir ?. In: Marie-Françoise Fuchs (dir.), Comment l’esprit vient aux vieux : Penser et vivre un vieillissement durable. Toulouse: Érès, 103-112.
https://doi.org/10.3917/eres.fuchs.2016.01.0103
Bemelmans, R., Gelderblom, G. J., Jonker, P., & de Witte, L. (2012). Socially Assistive Robots in Elderly Care: A Systematic Review into Effects and Effectiveness. Journal of the American Medical Directors Association. 13, 114-142.
https://doi.org/10.1016/j.jamda.2010.10.002
Bemelmans, R., Gelderblom, G. J., Jonker, P., & de Witte, L. (2016). How to use Robot Interventions in intramural Psychogeriatric Care; A Feasibility Study. Applied Nursing Research. 30, 154-157.
https://doi.org/10.1016/j.apnr.2015.07.003
Bien, Z. Z., Lee, H. E., Kim, Y. M., Kim, Y. H., Jung, J. W., & Park, K. H. (2005). Steward robot for human-friendly assistive home environment. In Volume 18: Promoting Independence for Older Persons with Disabilities. Amsterdam:IOS Press, 75-84.
Borenstein, J. and Pearson, Y. (2010). Robot caregivers: harbingers of expanded freedom for all? Ethics and Information Technology. 12, 277-288.
https://doi.org/10.1007/s10676-010-9236-4
Becker, H., Scheermesser, M., Früh, M., Treusch, Y., Auerbach, H., Hüppi, R., A., & Meier, F. (2013). Robotik in Betreuung und Gesundheitsversorgung. Zürich: VDF.
Broekens, J., Heerink, M., & Rosendal, H. (2009). Assistive social robots in elderly care: a review. Gerontechnology. 2, 94-103.
https://doi.org/10.4017/gt.2009.08.02.002.00
Calo, C. J., Hunt-Bull, N., Lewis, L., & Metzler, T. (2011). Ethical Implications of Using the Paro Robot, with a Focus on Dementia Patient Care. Human-Robot Interaction in Elder Care: Papers from the 2011 AAAI Workshop. Volume WS-11-12.
http://dblp.uni-trier.de/db/conf/aaai/care2011.html#CaloHLM11
Carrion-Martinaud, M., Bobillier-Chaumon, M. (2017). Présence de robots dans les EHPAD. Mieux vivre la séparation familiale. Dialogue. 217, 45-56.
https://doi.org/10.3917/dia.217.0045
Coeckelbergh, M. (2010). Health Care, Capabilities, and AI Assistive Technologies. Ethical Theory and Moral Practice. 13, 181-190.
https://doi.org/10.1007/s10677-009-9186-2
Coeckelbergh, M. (2011). Humans, animals, and robots: a phenom-enological approach to human-robot relations. International Journal of Social Robotics. 3, 2, 197-204.
Cuddy, A.J.C., Fiske, S.T (2002). Doddering, but Dear: Process, Content, and Function in Stereotyping of Older Persons. In T. Nelson (dir.) Ageism: Stereotyping and Prejudice Against Older Persons, MIT Press. 3-26.
De Beauvoir, S. (1970). La Vieillesse. Paris : Gallimard. Édition du Kindle.
Devillers, L. (2021). Les armes de l’intelligence artificielle. Pour la Science. 523, 5, 26-32.
https://doi.org/10.3917/pls.523.0026
Devillers, L. (2020). Les Robots émotionnels. Paris : L’Observatoire.
https://doi.org/10.3917/cerpsy.122.0069a
Deutscher Ethikrat (Hrsg.) (2020). Robotik für gute Pflege.
https://www.ethikrat.org/fileadmin/Publikationen/Stellungnahmen/deutsch/stellungnahme-robotik-fuer-gute-pflege.pdf
Doron, C.-O., Lefève, C., & Masquelet, A.-C. (2011). Soin et subjectivité. Paris : PUF.
Follmann, A., Schollemann, F., Arnolds, A., Weismann, P., Laurentius, T., Rossaint, R., & Czaplik, M. (2021). Reducing Loneliness in Stationary Geriatric Care with Robots and Virtual Encounters-A Contribution to the COVID-19 Pandemic. International journal of environmental research and public health. 18, 9, 4846.
https://doi.org/10.3390/ijerph18094846
Foucault, M. (2003) Society must be defended. Lectures at the Collège de France 1975–76. NY: Picador. (version française originale : Foucault, M. (1997). Il faut défendre la société. Cours au Collège de France. 1976. Coll. Hautes études. Paris: EHESS, Gallimard, Seuil.)
Getson, C, Nejat, G. (2021). Socially Assistive Robots Helping Older Adults through the Pandemic and Life after COVID-19. Robotics. 10, 3, 106. https://doi.org/10.3390/robotics10030106
Grollman, E. A. (2014). Multiple Disadvantaged Statuses and Health: The Role of Multiple Forms of Discrimination. Journal of Health and Social Behavior. 55, 1, 3-19. https://doi.org/10.1177/0022146514521215
Jøranson, N. (2016). Emotional robots as health promotion in dementia care – group activity with a seal robot in nursing homes. PhD Thesis. Norwegian University of Life Sciences.
https://nmbu.brage.unit.no/nmbu-xmlui/handle/11250/2687872
Juel, W. K., Krügher, N., & Bodenhagen, L. (2018). Robots for Elderly Care Institutions: How They May Affect Elderly Care. In M. Coechelbergh, J. Loh, M. Funk, J., J. Seibt, & M. Nørskov (Eds.), Envisioning Robots in Society-Power, Politics, and Public Space: Proceedings of Robophilosophy 2018 / Transor 2018. IOS Press Frontiers in Artificial Intelligence and Applications. Vol. 311, 221-230.
https://doi.org/10.3233/978-1-61499-931-7-221
Juliens, C. (2016). Le corps intime. La formation corporelle des soignants. Paris : Seli arslan.
Kemp, P. (2000). Four Ethical Principles in Biolaw. Bioethics and Biolaw. 2, 13-22.
Kolling, T., Haberstroh, J., Kaspar, R., Pantel, J., Oswald, F., & Knopf, M. (2013). Evidence and deployment-based research into care for the elderly using emotional robots: Psychological, methodological and cross-cultural facets. GeroPsych: The Journal of Gerontopsychology and Geriatric Psychiatry. 26, 83-88.
https://doi.org/10.1024/1662-9647/a000084
Kruse, A. (2008). Weiterbildung in der zweiten Lebenshälfte. Multidisziplinäre Antworten auf Herausforderungen des demografischen Wandels. Biefeld: WBV.
Kruse, A. (2008). Alter und Altern – konzeptionelle berlegungen und empirische Befunde der Gerontologie. In Weiterbildung in der zweiten Lebenshälfte. Multidisziplinäre Antworten auf Herausforderungen des demografischen Wandels. Biefeld: WBV, 21-48
Kruse, A (2009). Bildung im Alter. In: Tippelt, R., von Hippel, A. (eds). Handbuch Erwachsenenbildung/Weiterbildung. VS Verlag für Sozialwissenschaften
https://doi.org/10.1007/978-3-531-91834-1_50
Laroque, G. (2004). Vivre et mourir très âgé en Maison de retraite, un défi. Études sur la mort. 126, 2, 19-26.
Leung AY, Chan SS et al. (2011). Service learning in medical and nursing training: a randomized controlled trial. Advances in Health Sciences Education. 17, 4, 529-545.
https://doi.org/10.1007/s10459-011-9329-9
Libin, A., Libin, E. (2005). Robots who care: Robotic Psychology and Robotherapy Approach. AAAI Fall Symposium: Caring Machines.
https://studylib.net/doc/13794371/robots-who-care–robotic-psychology-and-robotherapy-appro…#google_vignette
Meister, M. (2011). Mensch-Technik-Interaktivität mit Servicerobotern. Ansatzpunkte
für eine techniksoziologisch informierte TA der Robotik. Technikfolgenabschätzung
– Theorie und Praxis. 20, 1, 46-52.
Merleau-Ponty, M. (1964). Le visible et l’invisible. Paris : Gallimard.
Merleau-Ponty, M. (1945). Phénoménologie de la perception. Paris : Gallimard.
Merleau-Ponty (1968). Résumés de cours. Collège de France 1952-1960. Paris: Gallimard.
Merleau-Ponty (1995). La Nature. Notes Cours Collègue de France. Paris: Seuil.
Meunier, V., Foletti, T., B. (2021). Approches non médicamenteuses sensorielles et démence. Aide à la prise en charge des troubles du comportement en unité de psychiatrie de l’âge avancé. Rev Med Suisse. 7, 744, 1225-1228.
Meyer, S., Bollheimer, C. L., & Wahl, H. W. (2020). Assistive Robotik für ältere Menschen. Z. Gerontol. Geriatr. 53, 605–607.
https://doi.org/10.1007/s00391-020-01790-7
Misselhorn, C., Pompe, U., & Stapleton, M. (2013). Ethical considerations regarding the use of social robots in the fourth age. GeroPsych: The Journal of Gerontopsychology and Geriatric Psychiatry. 26, 121-133.
https://doi.org/10.1024/1662-9647/a000088
Nussbaum, M. (2011) Capabilités : comment créer les conditions d’un monde plus juste, Paris: Flammarion.
Officer, A., Thiyagarajan, J. A., Schneiders M. L., Nash P., & de la Fuente-Núñez V. (2020). Ageism, Healthy Life Expectancy and Population Ageing: How Are They Related? International Journal of Environmental Research and Public Health. 17, 9, 3159. https://doi.org/10.3390/ijerph17093159
OMS (2006). Constitution de l’organisation mondiale de la santé.
https://www.who.int/governance/eb/who_constitution_fr.pdf
OMS (2021). Global Report on ageism.
https://www.who.int/publications/i/item/9789240016866
ONU (2003). Déclaration politique et plan d’action international de Madrid sur le vieillissement. Deuxième assemblée mondiale sur le vieillissement. Madrid, 8-12 avril 2002.
https://social.un.org/ageing-working-group/documents/mipaa-fr.pdf.
ONU (2020). Decade of Healthy Aging 2020-2030.
https://cdn.who.int/media/docs/default-source/decade-of-healthy-ageing/final-decade-proposal/decade-proposal-final-apr2020-fr.pdf?sfvrsn=5be17317_6
Parviainen, J., Pirhonen, J. P. T. (2017). Vulnerable Bodies in Human–Robot Interactions: Embodiment as Ethical Issue in Robot Care for the Elderly. Transformations (Wayne). 29, 104-115.
Perez, D. (2020). VIDÉO. Atteinte d’Alzheimer, l’ex-ballerine se remet à danser sur le « Lac des Cygnes ». Le Parisien. 11 novembre.
https://www.leparisien.fr/video/video-atteinte-d-alzheimer-l-ancienne-etoile-se-remet-a-danser-sur-le-lac-des-cygnes-10-11-2020-8407737.php
Perruchoud, S. (2017). La fenomenología según Merleau-Ponty: un camino de descenso hacia las cosas. Revista de Filosofia. 42, 1, 59-76.
Petersen, A. (2017). Posthuman Wellbeing: an anthropological study of how a social robot in eldercare opens the possibility of a new kind of wellbeing. (Masters Thesis) Aarhus University: Aarhus, Denmark.
https://www.academia.edu/35377738/Posthuman_Wellbeing_-_An_anthropological_ study_of_how_a_social_robot_in_eldercare_opens_the_possibility_of_a_new_kind_of_wellbeing.
Rabbitt, S. M., Kazdin, A. E., & Scassellati, B. (2015). Integrating socially assistive robotics into mental healthcare interventions: applications and recommendations for expanded use. Clinical psychology review. 35, 35-46.
https://doi.org/10.1016/j.cpr.2014.07.001
Robinson, H., Macdonald, B., Kerse, N. and Broadbent, E. (2013). The Psychosocial Effects of a Companion Robot: A Randomized Controlled Trial. Journal of the American Medical Directors Association. 14, 9, 661-7.
https://doi.org/10.1016/j.jamda.2013.02.007
Robinson, H., MacDonald, B. and Broadbent, E. (2015). Physiological effects of a companion robot on blood pressure of older people in residential care facility: A pilot study. Australasian journal on ageing. 34, 27-32.
https://doi.org/10.1111/ajag.12099
Robinson, H., Broadbent, E., & MacDonald, B. (2016). Group sessions with Paro in a nursing home: Structure, observations and interviews. Australasian journal on ageing. 35, 2, 06–112.
https://doi.org/10.1111/ajag.12199
Rüegger, H., Roulet, D., & Eggert, N. (2016). Aspects éthiques liés à l’utilisation des technologies d’assistance dans les institutions de soins de longue durée (EMS). Berne : CURAVIVA Suisse.
Sharkey, A., Sharkey, N. (2010). Granny and the robots: ethical issues in robot care for the elderly. Ethics and Information Technology. 14, 27-40.
https://doi.org/10.1007/s10676-010-9234-6.
Shibata, T., Wada, K. (2011). Robot Therapy: A New Approach for Mental Healthcare of the Elderly – A Mini-Review. Gerontology. 57, 378-386.
https://doi.org/10.1159/000319015
Schmitt, E. (2008). Altersbilder und die Verwirklichung von Potenzialen des Alters. In Weiterbildung in der zweiten Lebenshälfte. Multidisziplinäre Antworten auf Herausforderungen des demografischen Wandels. Biefeld: WBV. 49-66.
Sebag-Lanoë, R. (1986). Mourir accompagné. Paris : Desclée de Brouwer.
Sebag-Lanoë, R. (1992). Soigner le grand âge. Paris : Desclée de Brouwer.
Sparrow, R., Sparrow, L. (2006). In the hands of machines? The future of aged care. Minds and Machines. 16, 141-161.
https://doi.org/10.1007/s11023-006-9030-6.
Wada, K., Shibata, T., Saito, T., & Tanie, K. (2004). Effects of robot-assisted activity for elderly people and nurses at a day service center. In Proceedings of the IEEE. 92, 11, 1780-1788.
https://doi.org/10.1109/JPROC.2004.835378
Wada, K., Shibata, T. (2006). Robot Therapy in a Care House – Results of Case Studies. Robot and Human Interactive Communication,. ROMAN 2006 – The 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield. UK, 581-586.
https://doi.org/10.1109/ROMAN.2006.314452
Wada, K., Shibata, T. (2007). Robot Therapy in a Care House – Change of Relationship among the Residents and Seal Robot during a 2-month Long Study. ROMAN 2007 – The 16th IEEE International Symposium on Robot and Human Interactive Communication. Jeju, Korea (South), 107-112.
https://doi.org/10.1109/ROMAN.2007.4415062
Wada, K., Shibata, T. (2007). Social Effects of Robot Therapy in a Care House – Change of Social Network of the Residents for Two Months. Proceedings 2007 IEEE International Conference on Robotics and Automation. Rome, Italy, 1250-1255.
https://doi.org/10.1109/ROBOT.2007.363156.
Wada, K., Shibata, T. (2008). Social and physiological influences of robot therapy in a care house. Interaction Studies. 9, 258-276.
https://doi.org/10.1075/is.9.2.06wad
Wilson, D. M., Nam, M. A., Murphy, J., Victorino, J. P., Gondim, E. C., & Low, G. (2017). A critical review of published research literature reviews on nursing and healthcare ageism. Journal of Clinical Nursing. 26, 23-24, 3881-92.
https://doi.org/10.1111/jocn.13803
Wright, J. (2018). Tactile care, mechanical Hugs: Japanese caregivers and robotic lifting devices. Asian Anthropology. 17,1, 24-39.
https://doi.org/10.1075/Is.9.2.O6wad
10.1080/1683478X.2017.1406576
Site officiel français sur Paro : https://www.phoque-paro.fr/paro-seul-phoque-certifie-dispositif-medical/ (vu le 23.01.2023).
[1] Sur le problème contemporain du vieillissement de la population, voir ONU 2003 et Becker et al. 2013.
[2] Nous avons obtenu un soutien du domaine « Âge et société » de la Fondation Leenaards (Canton de Vaud en Suisse) en 2021 pour le projet « Interactions personne âgée-robot : comprendre la place du corps âgé vivant » dont l’objectif principal est d’apporter des clefs de compréhension innovantes pour améliorer la qualité de vie et le bien-être des personnes âgées vivant en établissement médico-social (EMS). Ce projet est un projet préambule à un projet plus ample « Personne âgée, soignant, robot : repenser la place du corps vulnérable dans le domaine des soins en gériatrie » (PASOR) financé par le Fond National Suisse.
[3] Nous parlons d’anthropologie dans son sens originaire et étymologique, comme étude de certains aspects de la nature humaine. Les aspects de la nature humaine qui nous intéressent ici sont ceux qui ont à voir avec le corps du point de vue de la phénoménologie, mais pas que. En ce sens, on pourrait également parler d’anthropologie du corps.
[4] L’âgisme consiste à avoir des attitudes discriminantes envers quelqu’un en raison de son âge (OMS, 2021).
[5] L’étude de Becker (2013) a justement montré que les craintes et préjugés concernant l’utilisation de robots auprès de personnes âgées vulnérables provient en grande partie du personnel soignant.
[6] Site officiel sur le phoque Paro : https://www.phoque-paro.fr/paro-seul-phoque-certifie-dispositif-medical/.
[7] L’étude de Meunier et Bizzozzero a montré qu’à un stade de démence avancée (stade FAST 7a-c), l’utilisation de Paro pouvait être moins efficace dans la gestion des comportements d’agitation pathologiques. L’hypothèse formulée par les enquêtrices est que Paro est moins adapté si la personne est en difficulté d’interaction verbale (p. 1228).
[8] D’autres auteurs comme Nussbaum (2011) ou Coeckelbergh (2010) ont pris comme point de départ les capacités propres de la personne, en particulier de la personne vulnérable (handicap, par exemple), afin de définir un champ d’être pour une vie « bonne » et qui pourrait rejoindre, en partie, cette pensée du corps vécu de Maurice Merleau-Ponty.
[9] Merleau-Ponty parle du corps humain comme d’un corps « vivant et debout » (1964, p. 179). Il utilise le terme « debout » pour signifier l’appartenance du corps vivant au monde sensible ; monde avec lequel il communique et interagit en tant que sensible sentant. De ce fait, le corps n’est pas dans le monde, il est du monde, à la fois contenu (comme chose sensible) et témoin (comme sujet sentant) du spectacle.
[10] L’hospice était anciennement ce que l’on appelle aujourd’hui les institutions de soin de longue durée pour personnes âgées ou institutions médico-sociales. Ce terme à connotation péjorative en raison de scandales liés à des formes de maltraitances à l’encontre de résidents a été totalement abandonné aujourd’hui.
[11] Ces questions ne sont pas développées dans cet article, mais elles le sont ou ont été dans des colloques (colloque IPARC de février 2022), articles à venir, recherches à venir.